Imitation learning can train humanoids to walk and manipulate, but teleoperated demos are expensive. Existing data-generation methods work well for arms, but transfer poorly to humanoids with coupled arms, legs, and torso control.
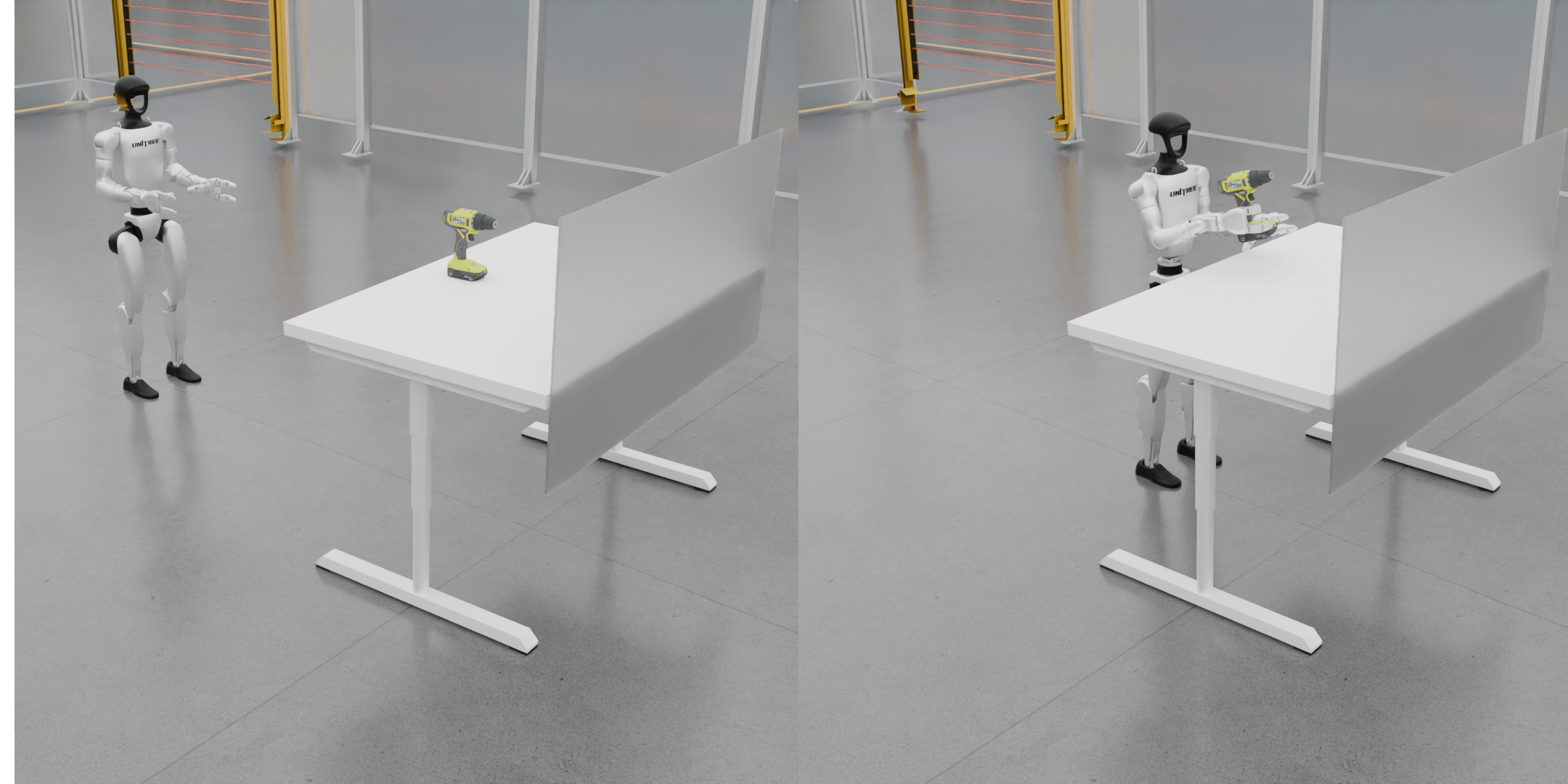
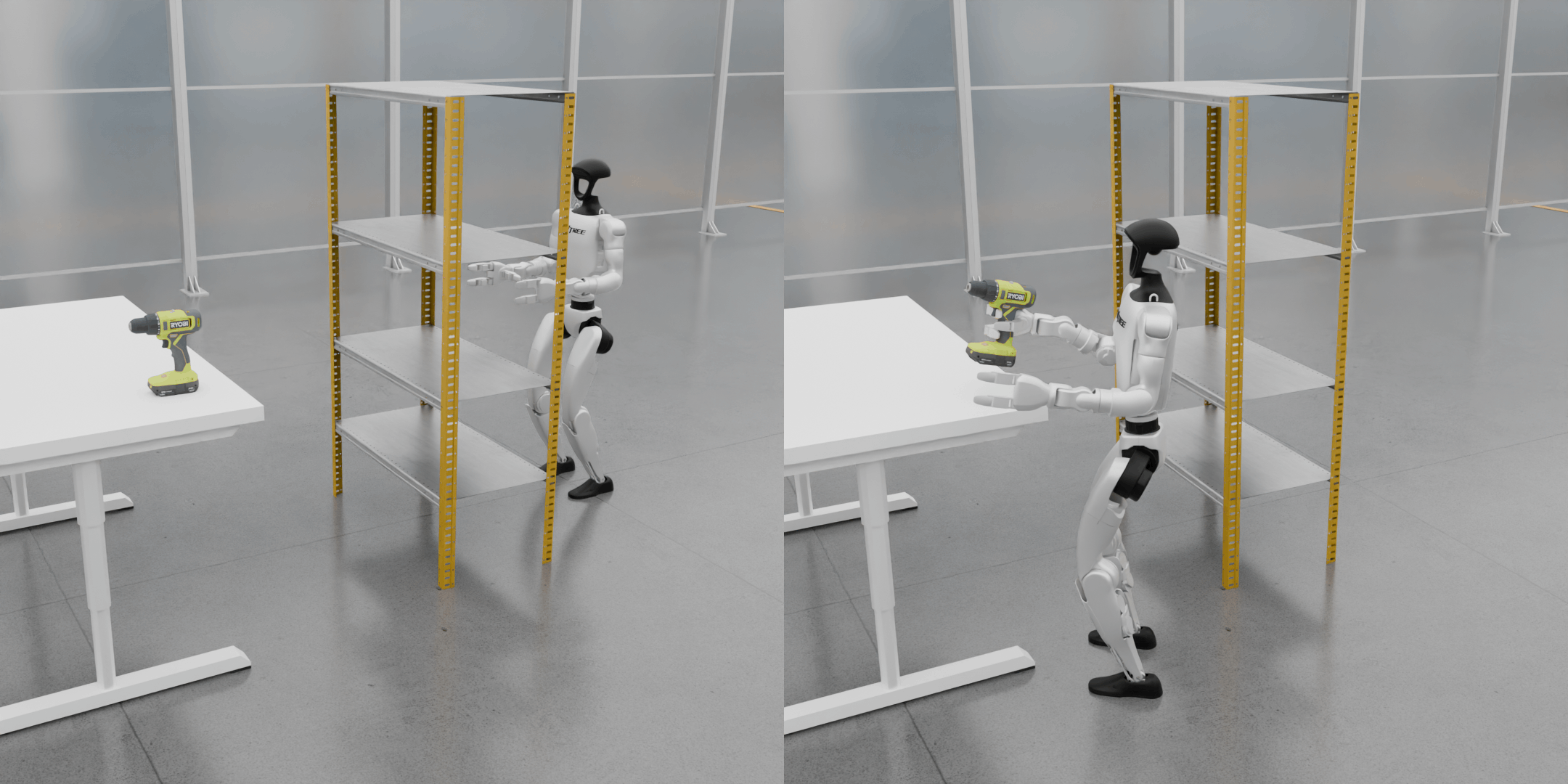
HumanoidMimicGen generates humanoid loco-manipulation data by adapting contact-rich whole-body skills from a few source demos to new states and object poses. It interleaves single- and dual-arm skills with locomotion and manipulation planning to produce stable trajectories in varied layouts.
We evaluate on a new simulated G1 loco-manipulation benchmark and study how data generation and policy design affect success. We also show that co-training policies on HumanoidMimicGen-generated data with a small real-world dataset outperforms those trained only on the real-world data by 20%.